


For LiDAR scanning solution Polygon Mirrors Special Feature Vol.1
For LiDAR scanning solution Polygon Mirrors Special Feature Vol.1
Chapter 1
Evolution of LiDAR Scanning
Optimizing LiDAR use for autonomous vehicles
Autonomous vehicles may be equipped with a variety of sensors to determine their location and surroundings. Sensors commonly include GPS, Inertial Navigation System, cameras, radar and LiDAR (Laser Radar). LiDAR has higher resolution than conventional RF radar and can see in total darkness.
This article addresses optimizing the use of LiDAR for avoiding collisions in the vehicle’s path. LiDAR involves rapidly 2D scanning one or more infrared lasers to create a 3D image. Here we will compare rotating a vertical array of lasers and detectors, with a fixed vertical scan angle, to using a polygon scanner with a galvanometer (galvo) scanner to move one or more laser beams over a variable vertical scan angle.
A well known LiDAR scanning technique is rotating a vertical array of lasers to scan a fixed span vertically and 360 degrees horizontally. A typical configuration has a vertical array of 16 lasers scanning 30 degrees giving a vertical resolution of 2 degrees. A 30 degree scan is illustrated in Figure 1.
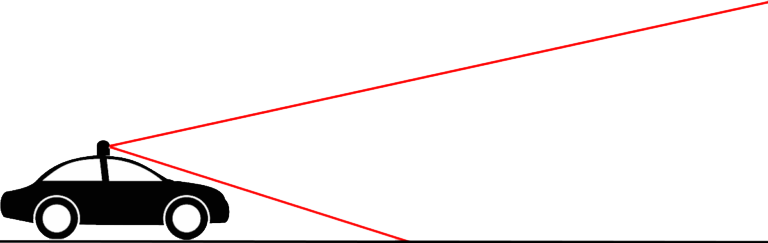
[FIGURE 1] 30 DEGREE LiDAR SCAN FOR COLLISION AVOIDANCE
A 30 degree vertical scan allows detection of objects on the road close in front of the autonomous vehicle and vertically to detect parking garage obstructions approaching hills as well as everywhere in between. With a fixed 2 degree vertical resolution, that gives beam spacing of 350 mm at a distance of 10 meters. This is adequate for collision avoidance at low speed. The beam spacing increases to 1.75 meters at a distance of 50 meters making it difficult to detect a pedestrian or an automobile and 3.5 meters at a distance of 100 meters making it difficult to detect a truck.
Approaching a hill, the area of interest could be a 20 degree scan as illustrated in Figure 2 below.
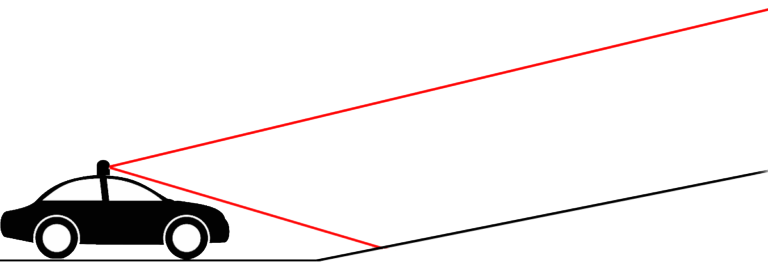
[FIGURE 2] 20 DEGREE LiDAR SCAN APPROACHING A HILL
Cresting a hilltop, the area of interest could immediately shift downward with a 10 degree scan as illustrated in Figure 3 below.
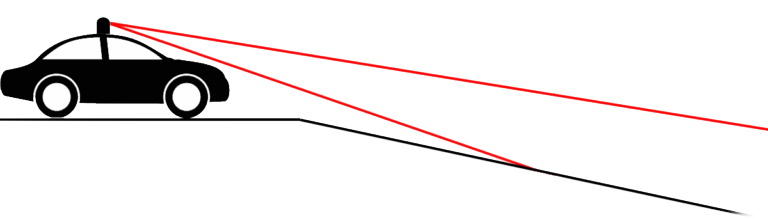
[FIGURE 3] 10 DEGREE LiDAR SCAN CRESTING A HILL
Traveling at highway speeds, the area of interest could shift horizontal with a 10 degree scan as illustrated in Figure 4 below.

[FIGURE 4] 10 DEGREE LiDAR SCAN DRIVING AT HIGH SPEED
If a polygon / galvanometer scanning LiDAR has only 16 lines of vertical resolution (like Figure 1 above), reducing the 30 degree AOI at slow speed to a 10 degree AOI at highway speeds would triple resolving power providing longer collision avoidance range needed at higher speeds.
How would the polygon / galvanometer LiDAR system know when to adapt the AOI to changing environments? At slow speeds a 30 degree AOI is useful to see the ground close in front of the AV and above the vehicle for parking obstructions. As speed increases, stopping distance increases and longer range is needed. No need to look two meters in front of the vehicle because it cannot stop that fast and no need to look for parking garage obstructions so narrowing the AOI is speed related.
As for approaching and cresting hills, the LiDAR periodically (perhaps once a second depending on speed) does a quick look up and down to see where ground is to adjust the AOI as needed. This process would also automatically compensate for vehicle pitching caused loading, accelerating, braking and bumps in the road.
Rotating lasers vs rotating laser beams. The rotating head of 16 vertical lasers and detectors is expensive. Adding more lasers and detectors to increase the resolution adds cost and size to this type of LiDAR.
A polygon scanner can rotate much faster than a spinning drum with 16 lasers and detectors. So a polygon scanner can obtain higher resolution images with fewer lasers and use the scanning more effectively by targeting only the Area Of Interest.
