


6軸力覚センサ 特集
- Chapter 1
- 6軸力覚センサ: 精密制御の未来を拓く、ニデックコンポーネンツの革新技術
近年の産業界は、人件費高騰と深刻な労働力不足という喫緊の課題に直面しています。この状況は、製造、物流、医療・介護といった多岐に亘る分野において、ロボット技術の導入加速と市場の拡大を強く牽引しています。特に、人工知能(AI)と機械学習の飛躍的深化は、人間と同等、あるいはそれ以上の高度かつ繊細な作業を実行可能な次世代ロボットの開発を促進しており、その実現には高感度かつ高精度なセンサ技術が不可欠です。
協働ロボットの性能を最大化する開発背景
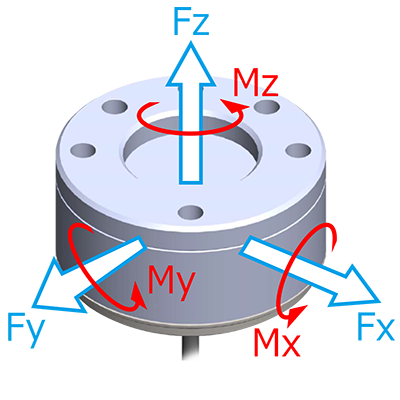
精密計測の核心: 6軸力覚センサの技術的優位性
-
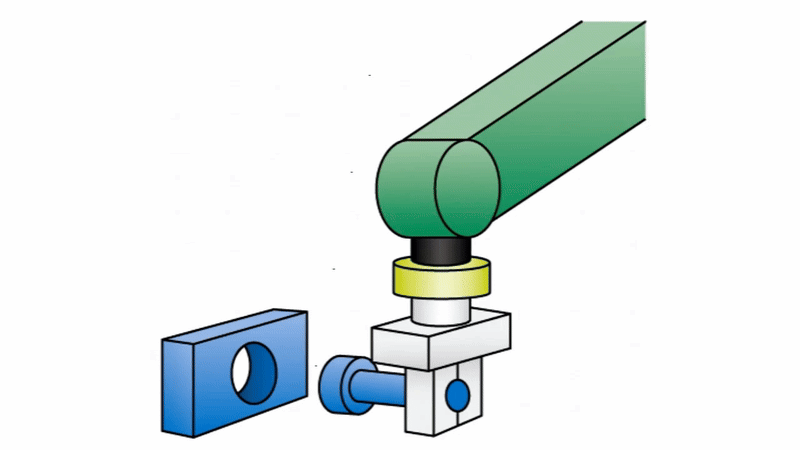
 押す/引く
押す/引く -
 ねじる
ねじる -
 傾ける
傾ける
6軸力覚センサが実現するアプリケーションと技術的優位性
- 精密組立・加工における革新
コネクタ挿入、研磨、精密嵌合といった、従来は熟練者の感覚に依存していた作業を、ロボットが極めて高い精度で自動化します。これにより、生産効率と品質の飛躍的な向上が実現されます。
- 物流・検査プロセスの最適化
ロボットハンドに搭載することで、パッケージの外観のみならず、質量差をも判別し、員数不足や誤搬送を確実に防止します。
- 医療・介護分野への貢献
手術支援ロボットにおいては、プライマリ側(操作者)とセカンダリ側(作業機)間での力覚フィードバックをリアルタイムに制御し、術者の微細な操作感を忠実に再現します。また、リハビリテーションロボットや介護支援ロボットが人の身体に触れる際の力加減を最適化し、安全で優しい介助を実現します。
- ヒューマノイドロボットの高度な自律制御
2足歩行するヒューマノイドロボットの足裏や関節部に搭載することにより、地面からの反力や身体にかかる荷重を精緻に検知します。これによって、不整地での安定した歩行、バランス保持、そして転倒回避といった高度な自律制御を実現可能とし、実用化に向けた研究開発を加速させます。
- Chapter 2
- 主な特長: ニデックコンポーネンツが提供する確かな価値
当社の6軸力覚センサは、その卓越した特性により、お客様の多様なニーズにお応えします。
- 高モーメント比
ロボットの急停止・急加速時における慣性モーメントの影響を抑制し、予期せぬ負荷にも耐えうる余裕のある動作を実現します。
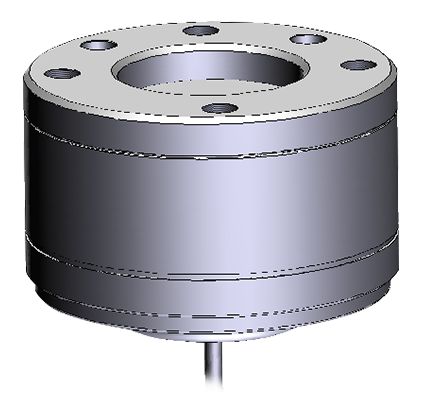
- 小径・薄型設計
φ 63 mm というコンパクトな筐体は、アームへの直接実装を可能にし、システム全体の省スペース化と設計自由度を向上させます。
- 高い耐衝撃性(専用ストッパー機構搭載)
独自の金属薄膜成膜技術と専用ストッパー機構により、外部からの過大な力や衝撃に対し、センサ本体の破損を物理的に防止し、長期的な信頼性と運用コストの低減に貢献します。
- 卓越した耐環境性能
高感度かつ低温度係数のひずみゲージの採用に加え、IP65相当の防塵・防水性能により、温度変化が激しい環境や粉塵・水が介在する過酷な条件下でも、一貫して安定した高精度な計測を維持します。
- 高速サンプリング
瞬時の力の変化を捉える高応答性により、ロボットのリアルタイム精密制御を可能にし、より滑らかで繊細な動作を実現します。
- 優れたコストパフォーマンスと高品質
センサ素子の製造から組立、校正までを自社工場で一貫して行う垂直統合生産体制により、徹底した品質管理と大幅なコスト効率化を両立しています。
当社は、この6軸力覚センサを通じて、お客様の技術革新を強力に支援し、未来の自動化、精密制御の実現に貢献いたします。。
6軸力覚センサデモ動画
センサにかかる歪・応力を可視化しました。当社6軸力覚センサの高感度・高精度をご覧ください。
技術仕様
| モデル名 | FS063 | FS063 | |||
|---|---|---|---|---|---|
| 形状 | 外径 | φ 63 mm | |||
| 厚み | 38 mm | ||||
| 定格荷重 | Fx, Fy, Fz | ± 300 N | |||
| Mx, My, Mz | ± 30 Nm | ||||
| 過負荷容量 | 400 % F.S. | ||||
| 直線性 | ± 3 % F.S. | ||||
| ヒステリシス | 3 % F.S. | ||||
| 他軸感度 | ± 5 % F.S. | ||||
| 重量 | 490 g | ||||
| 保護構造 | IP65 相当 | ||||
| 通信方式 | RS-485 | ||||
|
|||||
上記仕様は、当社の標準品に関するものです。
- Chapter 3
- アプリケーション: 広がる可能性、革新的なソリューションを提供します
当社の6軸力覚センサは、その高精度な力・モーメント検出能力により、多岐にわたる分野で革新的なソリューションを提供します。ここでは、特に注目されるアプリケーションの一部をご紹介します。
1. ロボットによる精密組立・加工
精密嵌合(かんごう)作業
部品のわずかなズレや抵抗を検知し、コネクタ挿入や精密部品の組付けを自動で最適化します。
研磨・バリ取り
加工対象物の表面形状や硬さの変化をリアルタイムに感じ取り、均一な研磨や効率的なバリ取りを実現します。
デリケートな部品のハンドリング
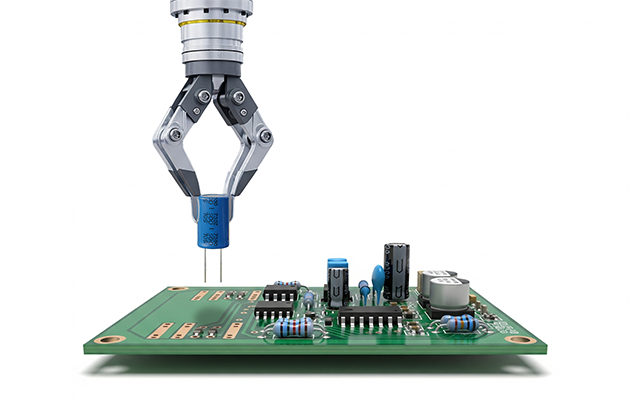
柔らかい素材や壊れやすい部品でも、破損させることなく優しく把持・搬送します。
ネジ締め・トルク管理
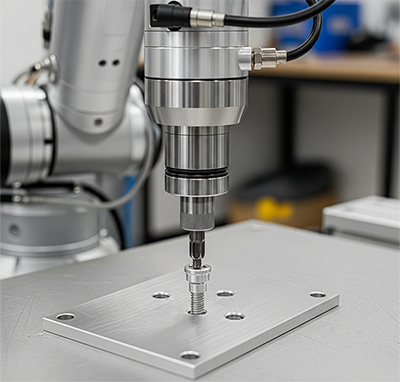
適切なトルクでネジを締め付け、締めすぎや緩みを防ぎます。
2. 物流・検査の高度化
多様な荷姿への対応

パレットに積まれた荷物の重心や形状の変化を検知し、不安定な荷物でも安全かつ効率的に積み下ろしを行います。
員数・品質検査

パッケージ内の製品の重さの微妙な違いや、梱包の歪みなどを検知して、数量不足や不良品の誤搬送を防止します。
3. 医療・介護分野への応用
手術支援ロボット
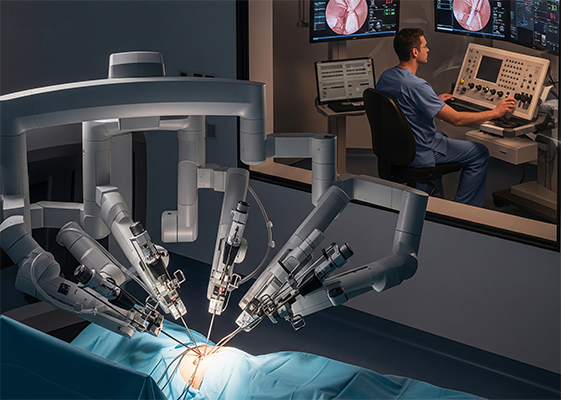

操作者(プライマリ)と作業機(セカンダリ)間で力のやり取りをリアルタイムに制御(プライマリ/セカンダリ制御)し、術者の繊細な感覚を忠実に再現することで、より安全で精密な手術を支援します。
リハビリテーションロボット

患者の状態に応じた最適な力加減で運動をサポートし、過度な負荷を防ぎながら、効果的なリハビリを促します。
介護支援ロボット

人の身体に触れる際の力加減を調整し、安全で優しい介助を実現します。
4. 研究開発・その他特殊用途
ヒューマノイドロボットのバランス制御
2足歩行するロボットが、足裏にかかる力を検知して姿勢を安定させたり、不整地でも転倒せずに歩行したりするための高度なバランス制御に活用されます。
力覚フィードバック
遠隔操作やシミュレーションにおいて、対象物からの反力を操作者に伝えることで、よりリアルな操作感や没入感を提供します。
素材の物性評価
微細な力や変形を正確に測定することで、新しい素材の強度や特性評価に利用できます。
お問い合わせ
