


六维力传感器 特集
六维力传感器 特集
- 第 1 章
- 六维力传感器: 尼得科科智博电子的创新技术塑造精密控制未来
当前工业领域正面临诸多紧迫挑战,包括劳动力成本的急剧上升和严重的劳动力短缺。这种情况正在显著加速机器人技术的采用,并推动其市场在制造、物流、医疗护理和养老护理等多个领域不断扩展。尤其是人工智能(AI)与机器学习(ML) 的飞跃发展,正推动着下一代机器人的研发,这些机器人能够执行与人类能力相当甚至超越人类能力的先进和精细任务。而要实现这一目标,高灵敏度、高精度的传感器技术是不可或缺的。
协作机器人性能优化的开发背景
精密测量的核心:六维力传感器的技术优势
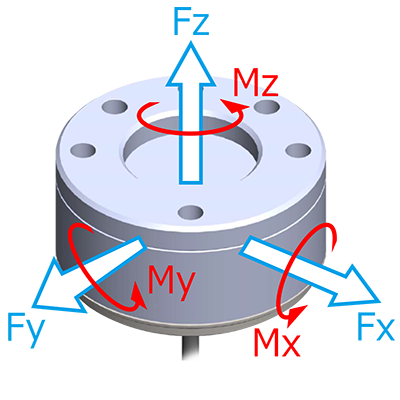
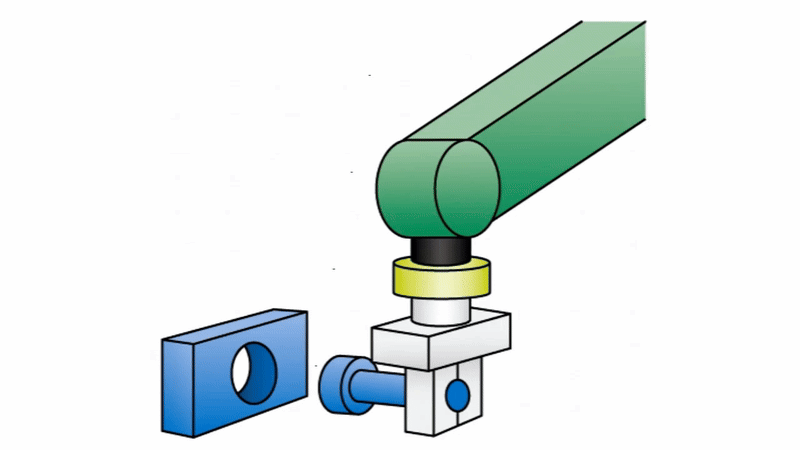
我们开发的六维力传感器能够同时且极高精确检测作用于目标物体的三个方向的力(Fx、Fy、Fz)和以及三个方向的力矩(Mx、My、Mz),共计6个力学分量。通过精确感知传统单轴或多轴传感器无法捕捉的复杂力变化,使机器人获得接近人类手腕动作的细腻“触觉”。这使得机器人能够实时理解,空间中各个方向上的应力变化,如推、拉、扭转和倾斜,从而实现高级的反馈控制。
-
 推/拉
推/拉 -
 扭转
扭转 -
 倾斜
倾斜
六维力传感器实现的应用与技术优势
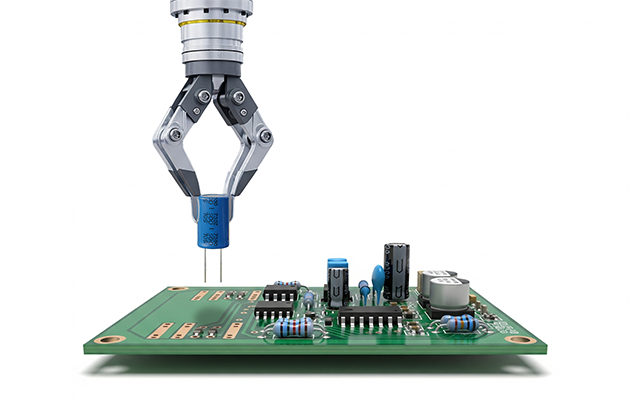
- 精密装配与加工领域的革新
传统上依赖熟练工人触觉感知的任务,如连接器插入、抛光和精密装配,现已由机器人以极高精度实现自动化。这极大地提升了生产效率和产品质量。这一变革显着提升了生产效率与产品质量。
- 物流与检测流程优化
安装在机器人手臂上时,不仅能区分包裹的外观,还能检测质量差异,从而可靠地防止数量不足或误搬运等问题。
- 对医疗和护理领域的贡献
在手术辅助机器人中,它实现了主操作侧(操作者)与从属操作侧(工作设备)之间力反馈的实时控制,忠实再现了外科医生的精细触觉感知。同时,可优化康复机器人和护理辅助机器人与人体接触时的施力,实现安全柔和的辅助操作。
- 人形机器人高级自主控制
通过在双足人形机器人的脚底和关节部位搭载该传感器,可精确检测地面反作用力及机体负荷。由此实现复杂地形下的稳定行走、平衡保持以及防跌倒等高级自主控制功能,加速实用化研发进程。
- 第 2 章
- 主要特点: 尼得科科智博电子提供的可靠价值
我们的六维力传感器凭借其卓越的特性,能够满足客户多样化的需求。
- 高力矩比
在机器人突然停止或加速时,有效抑制惯性力矩的影响,使其能够承受突发负载,实现更大幅度的动作。
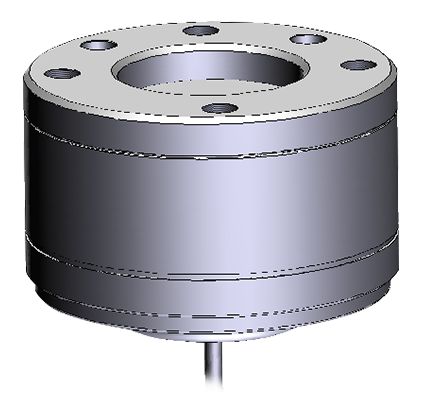
- 小直径与薄型设计
φ63mm紧凑外壳可直接安装于机器人手臂上,有助于整体系统节省空间,提升设计自由度。
- 高抗冲击性(搭载专用限位机构)
通过独有的金属薄膜沉积技术与专用限位机构,有效防止因外部施加过大力量或冲击而导致传感器本体损坏,从而提升长期可靠性,并有助于降低运行成本。
- 卓越的环境耐受性能
采用高灵敏度且低温度系数的应变计,并具备符合IP65标准的防尘防水性能,即使在温度变化剧烈或存在粉尘、水分等恶劣环境下,也能持续稳定地进行高精度测量。
- 高速采样性能
凭借对瞬时力变化的高响应能力,传感器能够实现机器人动作的实时精密控制,从而带来更加平滑且细腻的操作表现。
- 卓越的性价比与高品质
通过从传感器元件制造到组装、校准等全过程均在自有工厂内完成的垂直整合生产体系,实现了严格的质量管理与显著的成本优化。
我们通过六维力传感器,将致力于支持客户的科技创新,并为未来自动化和精密控制的实现做出贡献。
六维力传感器演示视频
我们将作用于传感器的应变和应力进行了可视化。敬请欣赏我们6轴力传感器的高灵敏度和高精度。
技术规格
| 型号名 | FS063 | FS063 | |||
|---|---|---|---|---|---|
| 形状 | 外经 | φ 63 mm | |||
| 厚度 | 38 mm | ||||
| 额定负载 | Fx, Fy, Fz | ± 300 N | |||
| Mx, My, Mz | ± 30 N·m | ||||
| 过载容量 | 400 % F.S. | ||||
| 直线性 | ± 3 % F.S. | ||||
| 滞后 | 3 % F.S. | ||||
| 他軸灵敏度 | ± 5 % F.S. | ||||
| 重量 | 490 g | ||||
| 防护等级 | 相当于IP65 | ||||
| 通信方式 | RS-485 | ||||
|
|||||
上述规格为本公司标准产品的相关信息。
如有任何需求,欢迎随时与我们联系。
- 第 3 章
- 应用领域: 提供不断扩展的可能性与创新解决方案
凭借其高精度的力与力矩检测能力,我们的六维力传感器在众多领域中提供了创新性的解决方案。以下是一些最具代表性的应用场景。
1. 机器人精密组装与加工
精密嵌合
可检测零部件的轻微错位或阻力,自动优化连接器插入与精密部件的组装过程。
研磨与去毛刺
通过对工件表面形状和硬度变化的实时感知,实现均匀研磨和高效去毛刺。
处理精密组件
轻轻握住并运输柔软或易碎的组件,避免损坏。
螺丝拧紧与扭矩管理
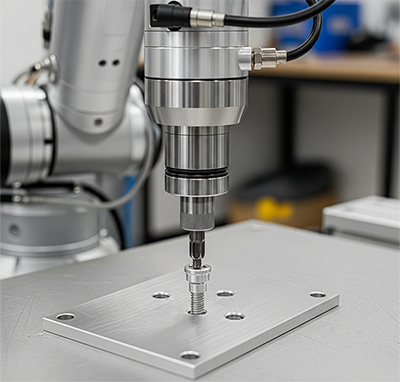
以适当的扭矩拧紧螺丝,有效防止过度拧紧或松动。
2. 先进的物流与检测
适应各种包装形式

检测托盘货物的重心和形状变化,即使是不稳定的物品也能安全高效地装卸。
数量与质量检测

检测包装内产品重量的细微差异以及包装变形,有效防止短缺或不良品的误发。
3. 在医疗与护理领域的应用
手术辅助机器人
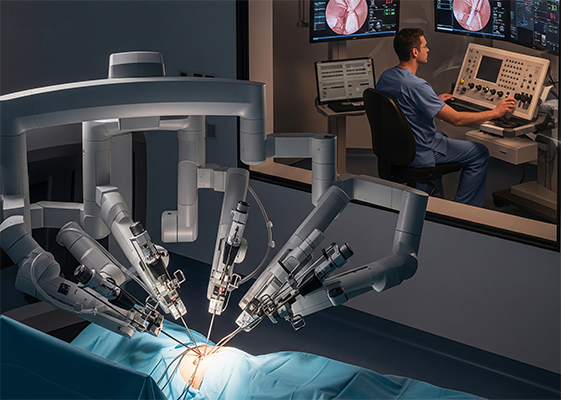

通过实时控制操作者(主控制)与操作设备(从控制)之间的力交互,支持更安全、更精确的手术,忠实再现外科医生的细腻触感。
康复辅助机器人

根据患者的状况调整最佳施力,辅助其进行运动训练,在防止过度负荷的同时促进有效康复。
护理支持机器人

在接触人体时自动调整施力,实现安全且温和的辅助操作。
4. 研发与其他特殊应用
人形机器人平衡控制
用于双足机器人的高级平衡控制,如通过检测脚底的力量来稳定姿势以及不平坦的地形上行走而不摔倒。
力反馈
通过将物体的反作用力传递给操作者,在远程控制和模拟中提供更真实的操作感和沉浸体验。
材料性能评估
可精确测量微小的力和变形,有助于评估新材料的强度和性能。
咨询
