


六維力傳感器 專題
六维力传感器 專題
- 第 1 章
- 六維力傳感器: 尼得科科智博電子的創新技術塑造精密控制未來
當前工業領域正面臨著許多緊迫挑戰,包括勞動成本的急劇上升和嚴重的勞動力短缺。這種情況正在顯著加速機器人技術的採用,並推動其市場在製造、物流、醫療護理和養老護理等多個領域不斷擴展。尤其是人工智慧(AI)與機器學習(ML) 的飛躍發展,正推動著下一代機器人的研發。這些機器人能夠執行與人類能力相當甚至超越人類能力的先進和精細任務。是而要實現這一目標,高靈敏度、高精度的感測器技術是不可或缺的。
協作機器人性能優化的開發背景
精密測量的核心:六維力傳感器的技術優勢
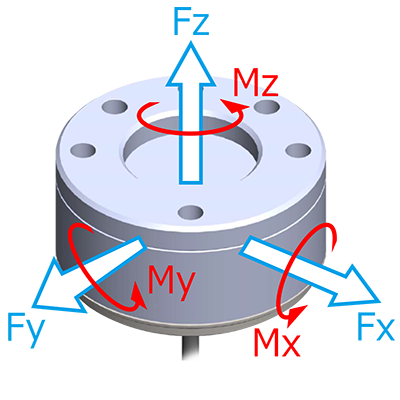
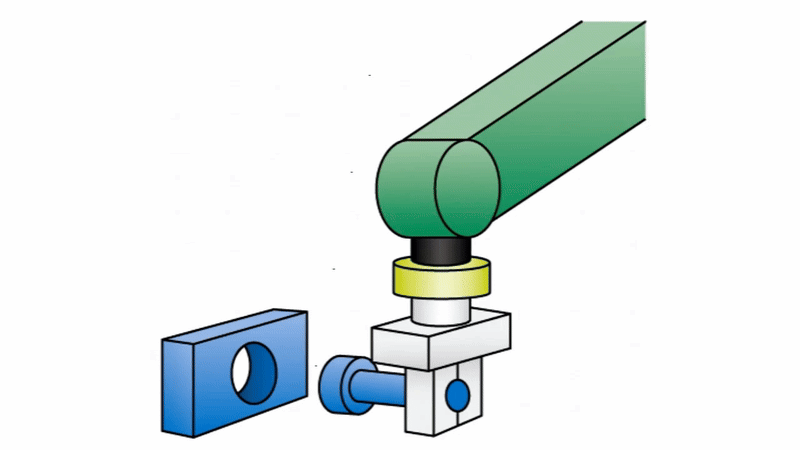
我們開發的的六維力傳感器能夠同時且極高精確偵測作用於目標物體的三個方向的力(Fx、Fy、Fz)以及三個方向的力矩(Mx、My、Mz),共6個力學分量。透過精確感知傳統單軸或多軸感測器無法捕捉的複雜力變化,使機器人獲得類似人類手腕的「觸覺」。這使得機器人能夠即時理解,空間中各個方向上的應力變化,如推、拉、扭轉和傾斜,從而實現高級的反饋控制。
-
 推/拉
推/拉 -
 扭轉
扭轉 -
 傾斜
傾斜
六維力傳感器實現的應用與技術優勢
- 精密組裝與加工領域的革新
傳統上依賴熟練工人觸覺感知的任務,如連接器插入、拋光和精密裝配,現已由機器人以極高精度自動化。這極大地提升了生產效率和產品品質。這項變革顯著提升了生產效率與產品品質。
- 物流與偵測流程優化
安裝在機器手臂上時,不僅能區分包裹的外觀,還能偵測品質差異,從而可靠地防止數量不足或誤搬運等問題。。
- 對醫療和護理領域的貢獻
在手術輔助機器人中,它實現了主操作側(操作者)與從屬操作側(工作設備)之間力回饋的即時控制,忠實再現了外科醫生的精細觸覺感知。同時,可優化復健機器人和護理輔助機器人與人體接觸時的施力,以實現安全柔和的輔助操作。
- 人形機器人高階自主控制
透過在雙足人形機器人的腳底和關節部位搭載此感測器,可精確偵測地面反作用力及機體負荷。由此實現複雜地形下的穩定行走、平衡維持以及防跌倒等高階自主控制功能,加速實用化研發進程。
- 第 2 章
- 主要特點: 尼得科科智博電子提供的可靠價值
我們的六維力傳感器憑藉其卓越的特性,能夠滿足客戶多樣化的需求。
- 高力矩比
當機器人突然停止或加速時,有效抑制慣性力矩的影響,使其能夠承受突發負載,實現更大幅度的動作。
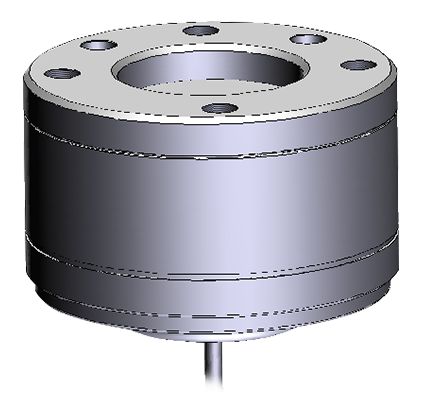
- 小直徑與薄型設計
φ63mm緊湊外殼可直接安裝於機器手臂上,有助於整體系統節省空間,提升設計自由度。
- 高抗衝擊性(搭載專用限位機構)
透過獨特的金屬薄膜沉積技術與專用限位機構,有效防止因外部施加過大力量或衝擊而導致感測器本體損壞,從而提升長期可靠性,並有助於降低運作成本。
- 卓越的環境耐受性能
採用高靈敏度且低溫度係數的應變計,並具備符合IP65標準的防塵防水性能,即使在溫度變化劇烈或存在粉塵、水分等惡劣環境下,也能持續穩定地進行高精度測量。
- 高速採樣性能
憑藉對瞬時力變化的高響應能力,感測器能夠實現機器人動作的即時精密控制,從而帶來更加平滑且細膩的操作表現。
- 卓越的性價比與高品質
透過從感測器元件製造到組裝、校準等全過程均在自有工廠內完成的垂直整合生產體系,實現了嚴格的品質管理與顯著的成本最佳化。
我們透過六維力傳感器,將致力於支援客戶的科技創新,並為未來自動化和精密控制的實現做出貢獻。
六維力傳感器演示視頻
將作用於感測器上的變形和應力可視化。歡迎體驗本公司六維力感測器的高靈敏度與高精度性能。
技術規格
| 型號名 | FS063 | FS063 | |||
|---|---|---|---|---|---|
| 形狀 | 外經 | φ 63 mm | |||
| 厚度 | 38 mm | ||||
| 額定負載 | Fx, Fy, Fz | ± 300 N | |||
| Mx, My, Mz | ± 30 N·m | ||||
| 過載容量 | 400 % F.S. | ||||
| 直線性 | ± 3 % F.S. | ||||
| 滯後 | 3 % F.S. | ||||
| 他軸靈敏度 | ± 5 % F.S. | ||||
| 重量 | 490 g | ||||
| 防護等級 | 相當於IP65 | ||||
| 通訊方式 | RS-485 | ||||
|
|||||
上述規格為本公司標準產品的相關資訊。
如有任何需求,歡迎隨時與我們聯繫。
- 第 3 章
- 應用領域: 提供不斷擴展的可能性與創新解決方案
憑藉其高精度的力與力矩偵測能力,我們的六維力感測器在眾多領域中提供了創新性的解決方案。以下是一些最具代表性的應用場景。
1. 機器人精密組裝與加工
精密嵌合
可偵測零件的輕微錯位或阻力,自動優化連接器插入與精密零件的組裝過程。
研磨與去毛刺
透過對工件表面形狀和硬度變化的即時感知,實現均勻研磨和高效去毛刺。
處理精密組件
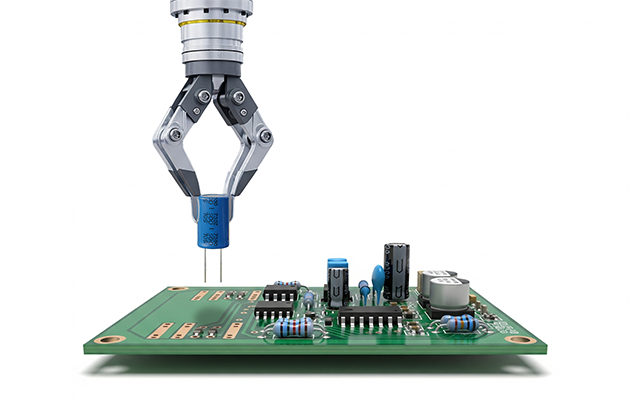
輕輕握住並運送柔軟或易碎的組件,避免損壞。
螺絲擰緊與扭力管理
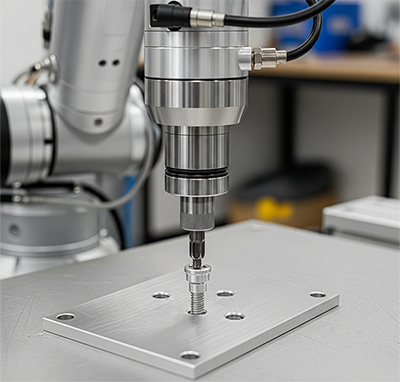
以適當的扭力擰緊螺絲,有效防止過度擰緊或鬆動。
2. 先進的物流與檢測
適應各種包裝形式

偵測托盤貨物的重心和形狀變化,即使是不穩定的物品也能安全且有效率地裝卸。
數量與品質檢測

偵測包裝內產品重量的細微差異以及包裝變形,有效防止短缺或不良品的誤發。
3. 在醫療與護理領域的應用
手術輔助機器人
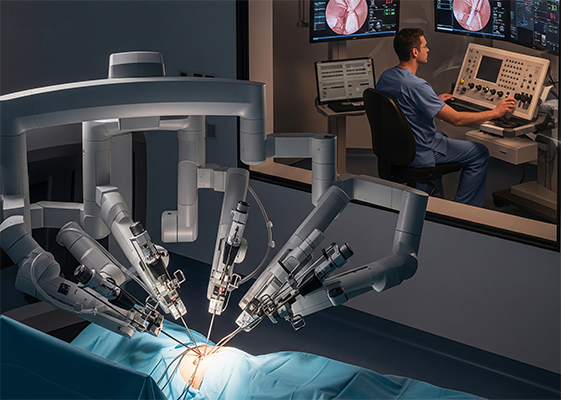

透過即時控制操作者(主控制)與操作設備(從控制)之間的力交互,支援更安全、更精確的手術,忠實再現外科醫師的細膩觸感。
康復輔助機器人

根據患者的狀況調整最佳施力,輔助其進行運動訓練,在防止過度負荷的同時促進有效復健。
護理支援機器人

接觸人體時自動調整施力,實現安全且溫和的輔助操作。
4. 研發與其他特殊應用
人形機器人平衡控制
用於雙足機器人的高級平衡控制,如透過偵測腳底的力量來穩定姿勢以及不平坦的地形上行走而不摔倒。
力回饋
透過將物體的反作用力傳遞給操作者,在遠端控制和模擬中提供更真實的操作感和沈浸體驗。
材料性能評估
可精確測量微小的力和變形,有助於評估新材料的強度和性能。
諮詢
